Muhayy Ud Din
KU Center for Autonomous Robotic Systems - Khalifa University, UAE.
Email: muhayyuddin.ahmed@ku.ac.ae
Email: muhayyuddin_1@hotmail.com
Google scholar
Current research interest
My current research interest is to bring robots out of the labs and make them capable of performing manipulation tasks robustly and intelligently. Robots should not scare or hesitate to interact with the environment :-)
Task and motion planning using AI-driven techniques
Autonomous navigation in marine environments to perform environmental monitoring and autonomous surveillance for maritime security, rescue operations, and irregular activity detection of vessels around ports.
My strength
I don't have any comfort zone. I can quickly adapt to any new tools for handling challenging problems.
Biography
I received a BS(Hons.) degree in Computational Physics from the University of Punjab in 2008 and an MS in Computer Science from the GC University Lahore, Pakistan, in 2011. I worked as a Lecturer at the Department of Computer Science of the GC University (2011 to 2012). After that, I joined the Centre for High Energy Physics (CHEP) as a visiting faculty member and taught computational Physics-related courses. I did my Ph.D. in Automatic Control, Robotics, and Computer Vision from the Institute of Industrial and Control Engineering (IOC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain.
During my PhD, I also participated as a researcher in R&D projects for the Spanish and Catalonian governments. Moreover, I visited other research labs (Kavraki Lab, RICE University, USA, and Institute of Robotics and Mechatronics, German Aerospace Center) as a short-term research scholar.
My Ph.D. thesis is about “Physics-based Motion Planning for Grasping and Manipulation.” I developed Knowledge-oriented Physics-based motion planning approaches. These strategies use a knowledge-based reasoning process to guide the physics-based motion planner for navigating among moveable obstacles. Moreover, I proposed physics-based motion planning approaches for grasping in clutter and uncertain environments (Video as available under video tab. ) and motion planning with temporal goals for mobile robots besides the simulation environment. I have practical experience working with real robots: ABB YuMi, KUKA-LWR, PAL-TiAGo, UR5, UR10, Franka FR3, and Bravo5 Underwater manipulator.
After my PhD in 2019, I joined ITK System Engineering (BOSCH Group of Companies) as a research and development engineer. I was involved in projects related to Medical Robotics, Augmented Reality, and Software Testing. I worked in this position for three years.
In July 2022, I joined Khalifa University Abu Dhabi as a PostDoc Research Fellow. I was working as a Project Manager for MBZIRC Maritime Grand Challenge (https://www.mbzirc.com/). My role was to lead the challenge-related developmental activities. Currently, I am leading the activities in which we are converting the challenge-related development to research articles 7 have already been submitted to top-ranked journals (Detail in publication tab). I am also involved in co-supervising PhD students in AI-driven task and motion planning, proposal writeups, and international engagements for collaborative research and developmental activities.
Research Areas
- Marine Robotics
- Robotic software development
- Physics-based motion planning for manipulation
- Grasping and manipulation
- Knowledge-oriented task and motion planning
Recent Results
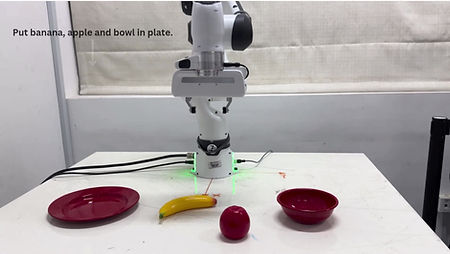
Advances in Large Language Models (LLMs), such as GPT-4, is transforming task planning by offering natural language as an intuitive and flexible way to describe tasks, generate symbolic plans, and reason. However, the effectiveness of LLM-based TAMP approaches is limited due to static and template-based prompting, which struggles in adapting to dynamic environments and complex task contexts. To address these limitations, this work proposes a novel ontology-driven prompt-tuning framework that employs knowledge-based reasoning to refine and expand user prompts with task contextual reasoning and knowledge-based environment state descriptions. Integrating domain-specific knowledge into the prompt ensures semantically accurate and context-aware task plans. The proposed framework demonstrates its effectiveness by resolving semantic errors in symbolic plan generation, such as maintaining logical temporal goal ordering in scenarios involving hierarchical object placement.

MBZIRC Final Demonstration of our team at Yas Abu Dhabi. The challenge was to develop a heterogeneous robotic system consisting of USV, UAVs, and a Manipulator to perform operations autonomously in the Maritime domain in GNSS-denied conditions.
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) aims to be one of the world’s largest international robotics competitions. Held every two years in Abu Dhabi as a real-world challenge for universities, research centers, companies, and individual innovators worldwide. The main objective of the challenge is to push the development beyond the current state-of-the-art.